【元ヤマハエンジニアから学ぶ】二輪運動力学からライディングを考察!|3限目:コマとバイクの共通点?
二輪工学の専門家、プロフェッサー辻井によるライディング考察
バイクのメカニズムや運動力学についてアカデミックに解説し、科学的検証に基づいた、ライテクに役立つ「真実」をお届けします!

科学館などに行くと、自転車のホイールのような回転体を使った体験装置があります。車軸の両側を両手で持ってホイールを回し、回転する椅子の上に座ってホイールを傾けることで、ジャイロモーメントを体感することができるのです。
車軸を水平に保ってじっとしていると何も起こりませんが、右や左に傾けると、回転する椅子の上で体が右に左に向きを変えてしまいます。このホイールの向きを変えたら、体の向きが変わる力(モーメント)がジャイロモーメントなのです。
【講義概要】 私が幼少の頃、お正月にはコマを回して遊んだものです(笑)。回転力が弱まるとフラフラして、やがて転倒してしまうコマを不思議に思いながら、回転力を高めるために勢いよく回そうとしていました。そして、ジャイロモーメントやプリセッション(歳差運動)という単語を知るようになり、バイクとも密接な関係にあることを理解できるようになりました。今回は、そんなお話をしましょう。
tips_1:コマが倒れない原理
ジャイロモーメント=Tは、「T=I×ω×Ω」というシンプルな式で表されます。「I」は回転体の慣性モーメントで、それは回転し難さを数値化したものと言えます。「ω(オメガ)」は回転体の回転速度(角速度)で、大文字の「Ω(オメガ)」は入力回転速度(角速度)で、ふらつきの度合いと理解してください。
では、コマを上から見た際に左回転している場合で、この式の意味をご説明しましょう。
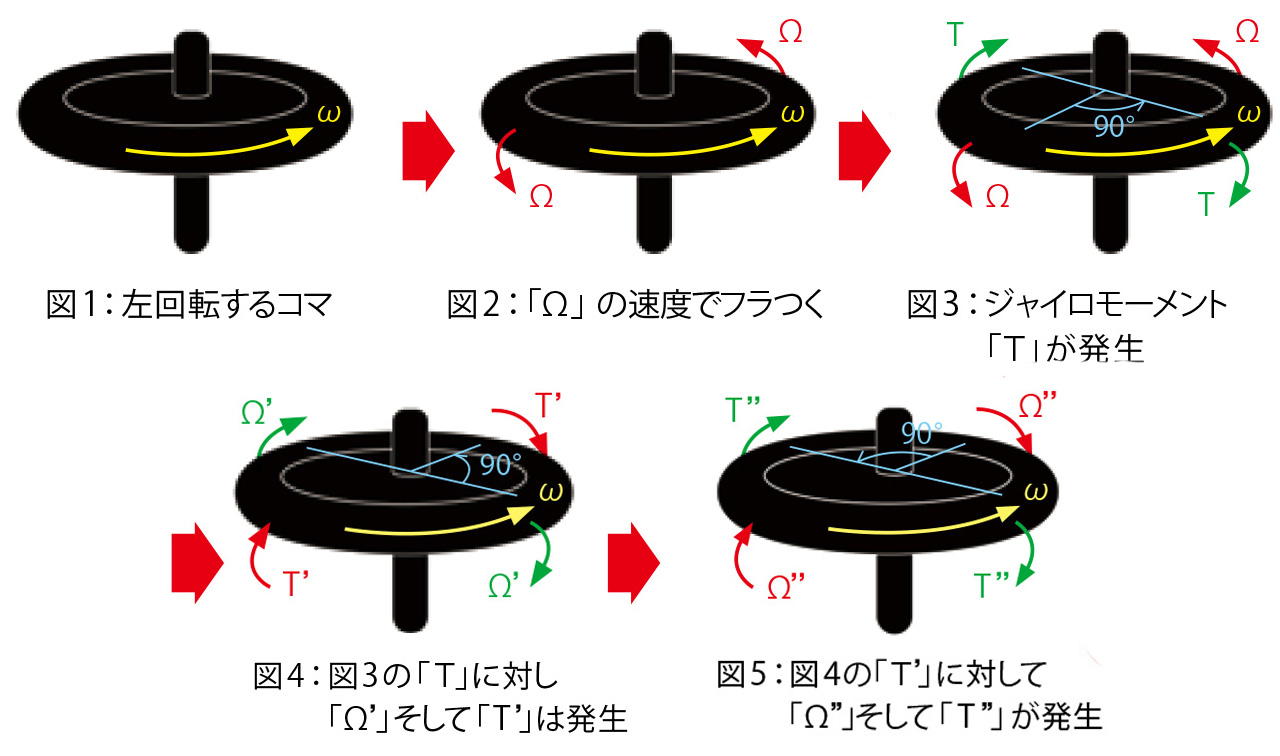
ωの速度で回転していたとします(図1)。地球の引力により1本足のコマには、倒れようとす る力が常に作用しています。その影響で、例えば図の方向にΩの速度で駒がふらついたとします(図2)。 するとあら不思議、ふらついた向きから90度ズレたところで、図のような向きにモーメントが即座に発生するのです。これがジャイロモーメントです(図3)。
ジャイロモーメントが発生すると図4のように、そのモーメントに応じた「Ω’」なるふらつき速度が発生したことと等価(同じ現象)になります。するとまた90°ズレたところにジャイロモーメント「T’」が発生します。そして、そのジャイロモーメントに応じて図5ように「Ω“」のふらつきが発生と、これを無限に(回転している限りですが)繰り返します。これこそがプリセッション(歳差運動)という、コマが回転している限り倒れない原理なのです。
そして、慣性モーメントが大きく、かつ回転速度が速いとジャイロモーメントも大きくなり、プリセッションの動きが目では分からないぐらい微少になり、安定するのです。回転数が落ちるとジャイロモーメントが減少してプリセッションが鈍くなり、最後には転倒してしまうわけです。
tips_2:バイクにおける前輪のジャイロモーメント
では、これら原理がバイクではどのように作用しているのでしょうか。
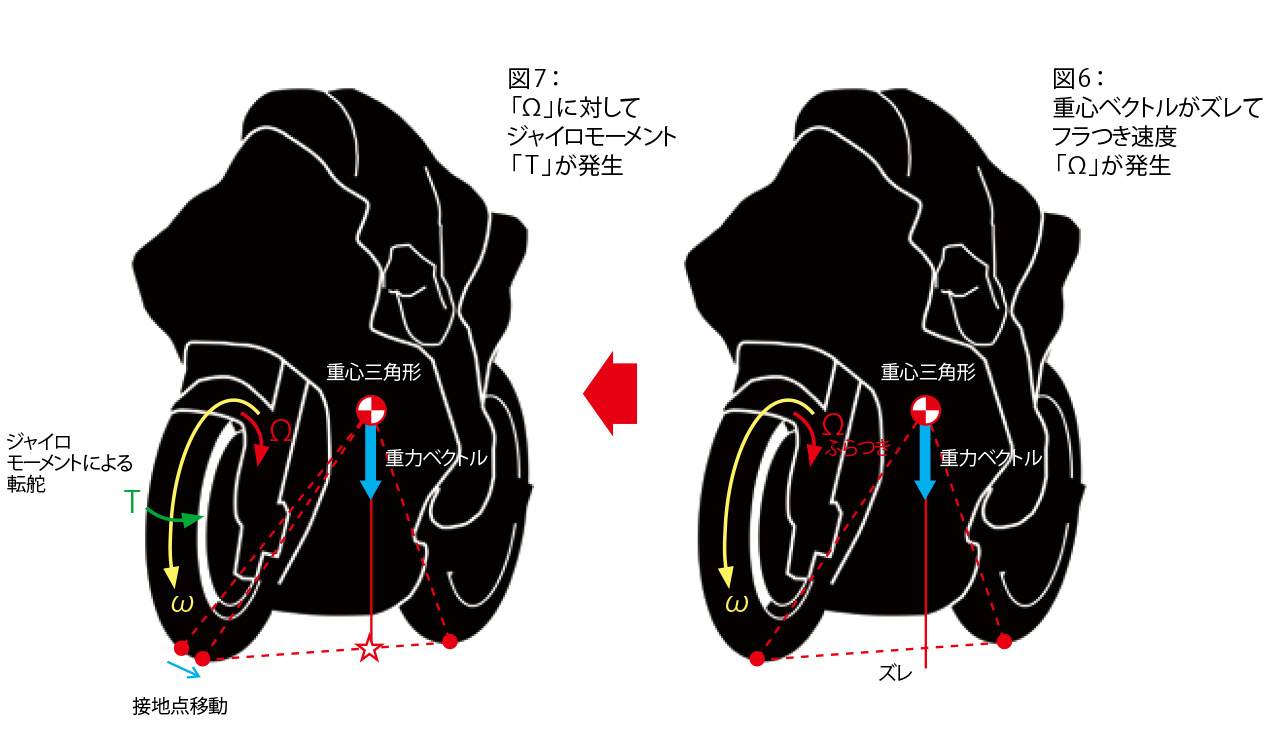
バイクが前進している時、前輪は進行方向に「ω」の速度で回転しています。その時、例えば図6のようにふらつくことで、重心三角形に対して重力ベクトルが左側にズレた場合、左側に微少な転倒モーメントによる「Ω」のふらつき速度が発生します。
前輪には操舵軸があるので90度とまではいきませんが、キャスター角に応じた方向にジャイロモーメント「T」が発生し、左に転舵されるのです(図7)。
そしてバイクは前進しているので前輪の接地点は左側への移動し重心三角形と重力ベクトルが重なり安定状態を獲得転倒モーメントが〞0〞になり転倒を免れるわけです。
tips_3:バイクのプリセッション
図7の時、ジャイロモーメントにより左側に転舵されたままでは、走行中の前輪接地点は左側へと移動し続けてしまいます。そこで重力ベクトルは、重心三角形の右側へとズレを発生させ、右側への転倒モーメントにより右側へ「Ω’」のふらつき速度が発生。前輪には右側へ転舵させるジャイロモーメントT’が生まれ、走行中の前輪接地点は右側へ移動。重力ベクトルが重心三角形と重なり、右側への転倒モーメントはゼロになり転倒を免れますが、今度は右に転舵され続けるので、重力ベクトルが重心三角形の左側にズレ……と、ジャイロモーメントによって微少な転舵(高速では0.1度以下)を繰り返します。これにより、バイクは転倒せず走行し続けることが可能となるのです。これを私はバイクのプリセッション(二輪の歳差運動)と呼んでいます。ジャイロモーメントを決定する前輪の慣性モーメントは、バイクの重要なファクターなのです。
冒頭の数式をご理解いただけると、車速が上がれば上がるほどジャイロモーメントは強くなり、高速ほどバイクは安定することが分かります。モトGPなどで、転倒してライダーを振り落としたバイクだけが走り続けるのも、前輪のジャイロモーメントによる二輪のプリセッションの特徴と言えます。
さらに、安定しているバイクを傾けて旋回するためには、このジャイロモーメントに打ち勝つ入力(プッシングステア=非セルフステア)が必須となるわけです。これは次回のお楽しみとしますが、少しだけ説明しておきます。
走行中の操舵力(プッシングステア)と前輪のジャイロモーメントには密接な関係にあり、実際にその値を私の研究チームが計測したことがあります。するとジャイロモーメントの理論計算値とプッシングステアの計測値が、なんとほぼ同じだったのです。理論と実際が証明された瞬間に私は感動を隠せませんでした。
この原理をご理解いただけると、直進中にはハンドルに無駄な力を入れないことで、ジャイロモーメントによるとても微少な転舵を阻害せず、バイクが安定することが分かります。逆に極低速(例えば一本橋)でジャイロモーメントが小さく、バイクを安定させるには不十分な状況では、ライダーが積極的にハンドル操作した方がバイクは安定するのです。普段は肩や腕の力を抜いていても、必要な時には必要な力と量だけ、ハンドル操作できる方がベテランライダーなんですね。
このジャイロモーメントに打ち勝ち正確無比な操縦をしていたマルク・マルケスが腕の怪我をした時、失速することを私は予測していました。今シーズン彼の腕が完治していれば、必ず復活してくるでしょう。