【元ヤマハエンジニアから学ぶ】二輪運動力学からライディングを考察!|1限目:なぜバイクは倒れずに走行できるのか?

二輪工学の専門家、プロフェッサー辻井による新連載がスタート!バイクのメカニズムや運動力学についてアカデミックに解説し、科学的検証に基づいた、ライテクに役立つ「真実」をお届けします!

私は免許を取得しバイクに乗り始めた16歳の頃から、バイクの爽快感という沼にハマるとともに、何故バイクは倒れずに走行できるのか不思議で仕方がなかったのです。
そして、ついにそれを理解することができ、その結果MOTOROiD(モトロイド)に搭載された二輪の自立技術AMCES(アムセス)を発明すると同時に、ライダーがどのようにしてバイクを操縦しているかも理解することができました。
バイクのライディングを理論的に理解しライディングスキルを向上させるためにも、この「なぜ倒れずに走行できるのか」を理解することはその第一章と言えます
【講義概要】 バイクは四輪車と比較すると、走ることに特化した実にシンプルな構造の乗り物です。加えて、ライダーが操縦しなければあっけなく転倒してしまうという、実にとても複雑な運動特性を有するものであります。 そこで、車両運動特性など力学的な観点から、車両の研究開発経験を通じて得た知見をベースにエンジニア視点から科学的にライディングを考察しましょう。
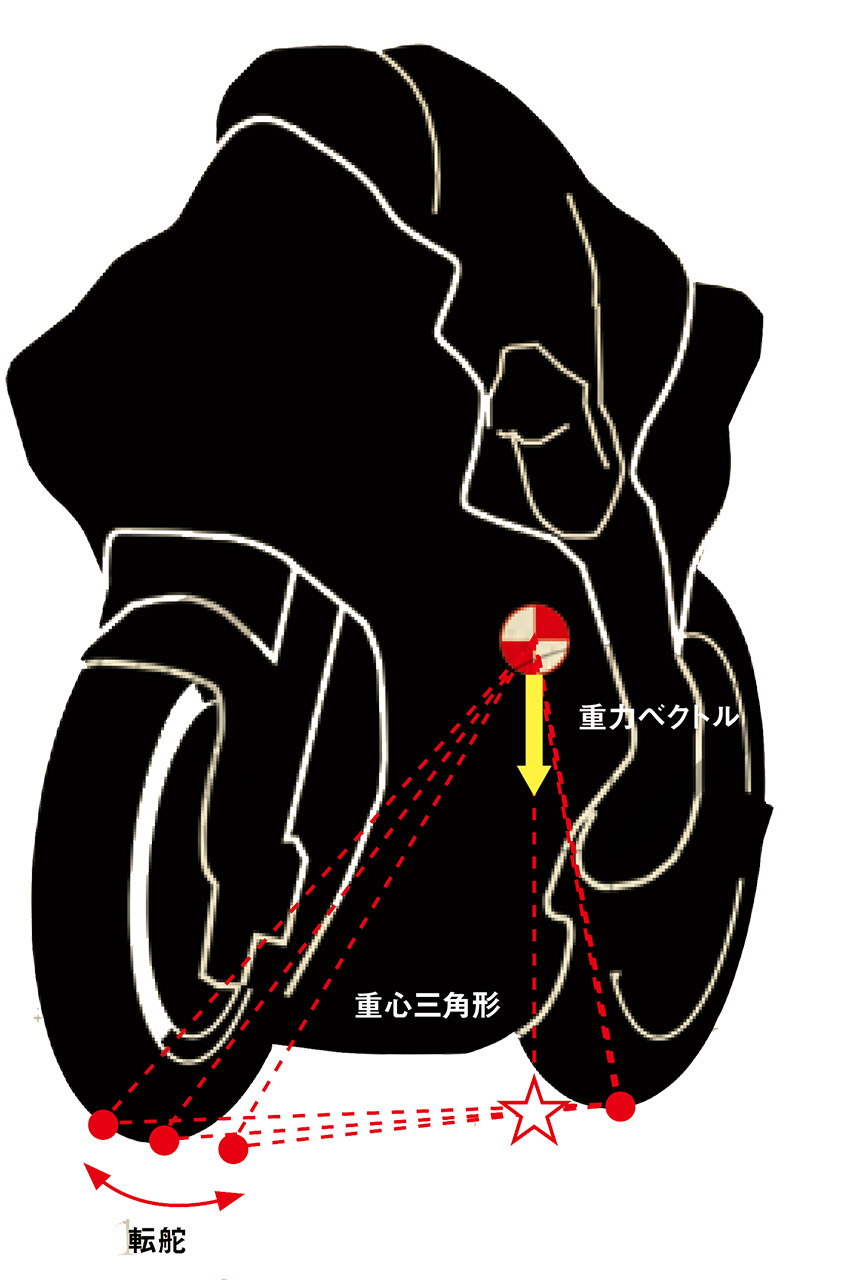
tips_1:重心三角形
ご存じのように、バイク停止時にはライダーが足を地面に着け、前輪と後輪を含めた合計3カ所以上、地面と接する点を構成することで転倒を回避できます。
一方、走行中には前輪と後輪の接地点の2カ所しか地面に接していません。しかし、不思議なことに転倒せずにしかもとても安定しています。この状態を「重心三角形」から考察してみましょう。
重心三角形とは、前輪の接地点と後輪の接地点、そしてライダーの体重も含め、車両全体の重心位置の3つの点を結んで描ける三角形です。
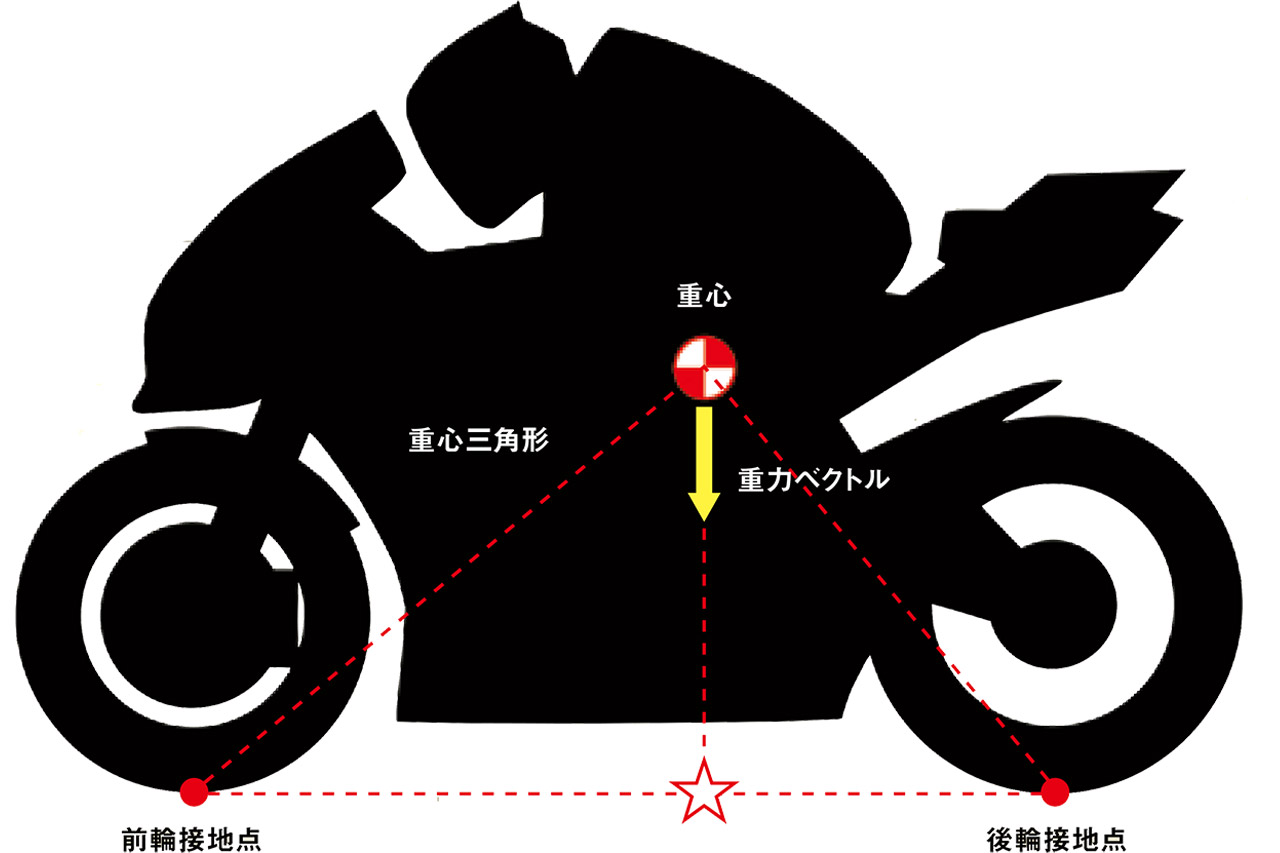
そして、バイクが一定の速度、つまり前後に加速減速していない状態では重心は地球の引力によって鉛直方向(下向きの矢印方向)に荷重が発生しています。この矢印を「重力ベクトル」と呼びましょう。
実は、この重心三角形は車両の運動の基本特性を決定づけるものでもあり、この単語は今後度々登場するので覚えておいてください。
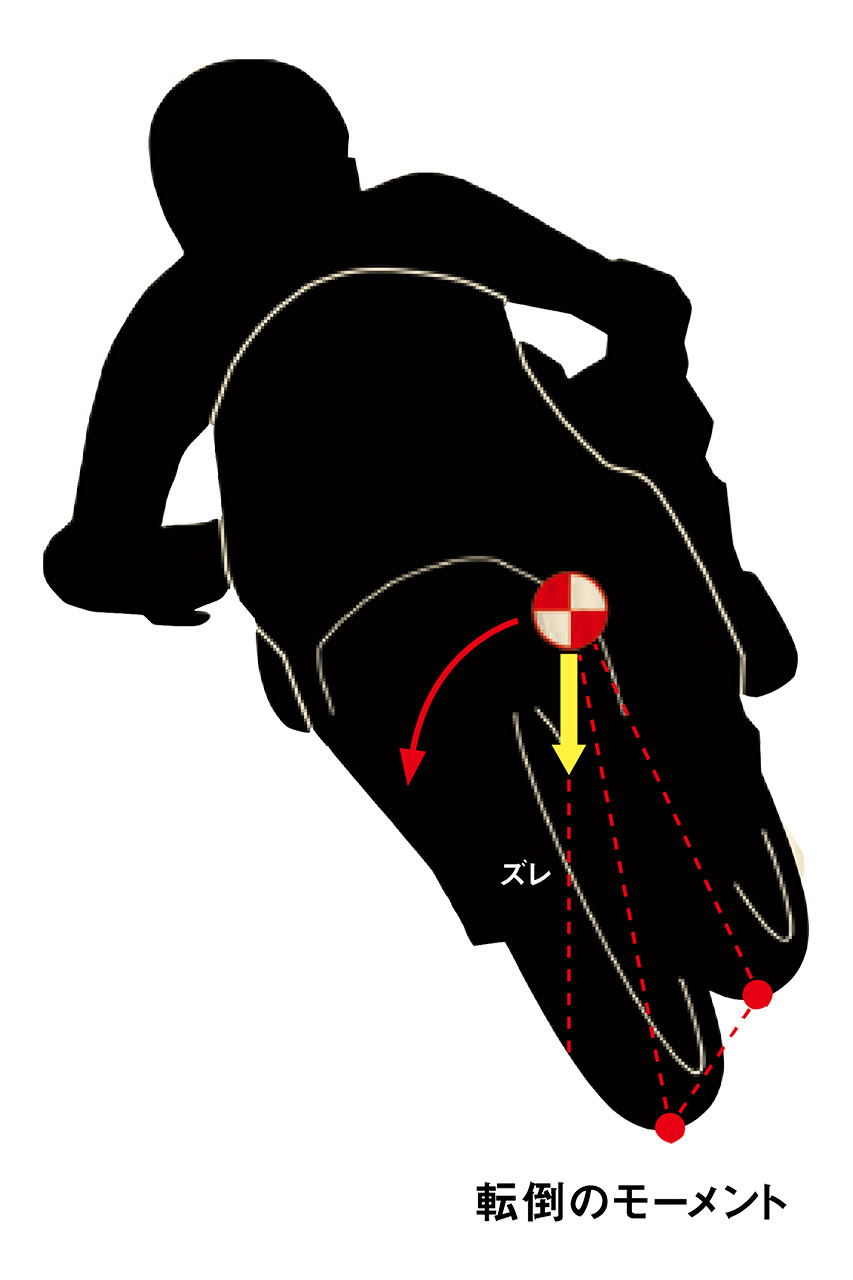
tips_2:転倒のメカニズム
この重力ベクトルの延長線と前輪の接地点、後輪の接地点を結ぶ直線が交わっている場合、つまり重力ベクトルと重心三角形の面が重なっている間は、バランスが保たれていてバイクは自立しています。
しかし、重心ベクトルは地球の引力に引っ張られるので、重心三角形の面から微妙なズレが発生し、車体は右か左のいずれかにモーメント(物体を回転させる力)が発生し、車両は倒れようとしています。
tips_3:安定のメカニズム
さて、バイクの前輪は操舵機構が装備されていて、左右に転舵できます。走行中の低速ではライダーが、中高速ではジャイロモーメントが前輪を左右に転舵させます。
例えば走行中、右に微妙に車両が傾いた場合、前輪も右に転舵すると前輪の接地点は右に移動します。重心三角形の1点(前輪の接地点)が右に移動し、重心三角形の面が重力ベクトルと重なって、転倒モーメントがゼロになり、自立したままになります。さらに前輪が右に転舵したままだと、重心三角形は重力ベクトルを追い越すような状態となり、今度は左側に転倒モーメントが発生してしまいます。
そのため、今度はライダーの操作、またはジャイロモーメントにて左側に転舵し、重心三角形が再び重力ベクトルと重なり安定します。さらに左に転舵したままだと、また重心三角形が重力ベクトルを追い越し……と、左右に絶え間なく、微妙かつ連続的に転舵を繰り返すことで、車両は転倒せずに走行し続けることが可能となっています。これを「二輪のプリセッション(歳差運動=駒が倒れない現象)」と呼びます。
ジャイロモーメントと二輪のプリセッションについては、また機会があれば詳しく解説しましょう。さて問題は、低速ではこのジャイロモーメントが小さ過ぎるためライダーが積極的に左右に操舵する必要があります。
もちろん、セルフステアが発生することで同じように安定しようとしているので、時にライダーはこのセルフステアの邪魔をしないようにしなければなりませんし、セルフステアの量が少ない時はライダーが転舵不足分を補うべく積極的に操舵しなければ車両は安定せずに転倒してしまいます。
この使い分けは経験が必要と言え、緊張して肩に力が入りがちなビギナーにはとても難しく、その緊張がセルフステアの邪魔をしたり、時には必要な操舵も行えず、結果としてとても不安定な状態を生むことになります。
したがって、ビギナーは特に極低速ではむしろ積極的に左右に操舵することを心掛けた方が、安定した走行が可能になると言えます。
そして、中高速では十分なジャイロモーメントが発生するので、ライダーはその邪魔をしないように肩の力を抜いたほうが車両は安定して直進してくれるわけです。
もし、高速道路などで走行していても微妙に真直ぐに走れない方は、肩に力が入っているからかもしれません。