【元ヤマハエンジニアから学ぶ】二輪運動力学からライディングを考察!|6限目:体重移動の効果
二輪工学の専門家、プロフェッサー辻井によるライディング考察 バイクのメカニズムや運動力学についてアカデミックに解説し、科学的検証に基づいた、ライテクに役立つ「真実」をお届けします!

バイクを操縦するテクニックのひとつとして体重移動があります。しかし、その原理と効果を正しく理解するのは意外に難しいと常々思っていて、体重移動と一言で言っても3つの使い分けがあると私は考えます。ひとつはライダーが前後方向に身体を移動させることによる荷重制御。ふたつ目はライダーが左右方向の異なる位置に座ることによる重心移動。3つ目はステップを踏み込むことによる微妙なバランス制御とでも言えばよいでしょうか。
特に3つ目はとても複雑。時として重心移動や荷重制御的な要素もあるので混乱しがちで、正確無比なステップ荷重制御ができるのはトライアル選手だけかもしれません。
tips_1:前後の荷重制御
これは誰もが無意識の内に多少やっています。そう加速する時には前傾しやや伏せるような姿勢、減速時には上体を起こすなどして加減速Gに耐えようとしています。実は、この時自然と荷重制御も行っていることになります。加減速している状態では少し複雑になるので、一定速度で加減速していない状態で考えてみましょう。
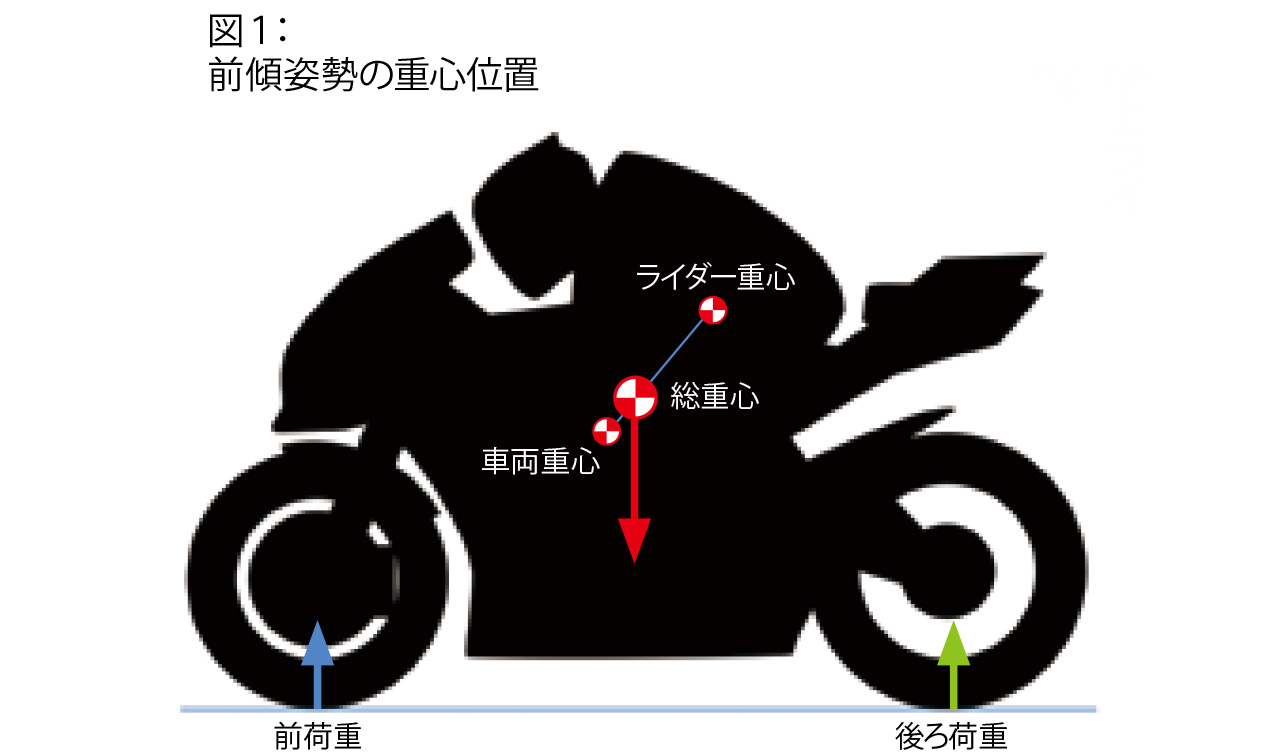
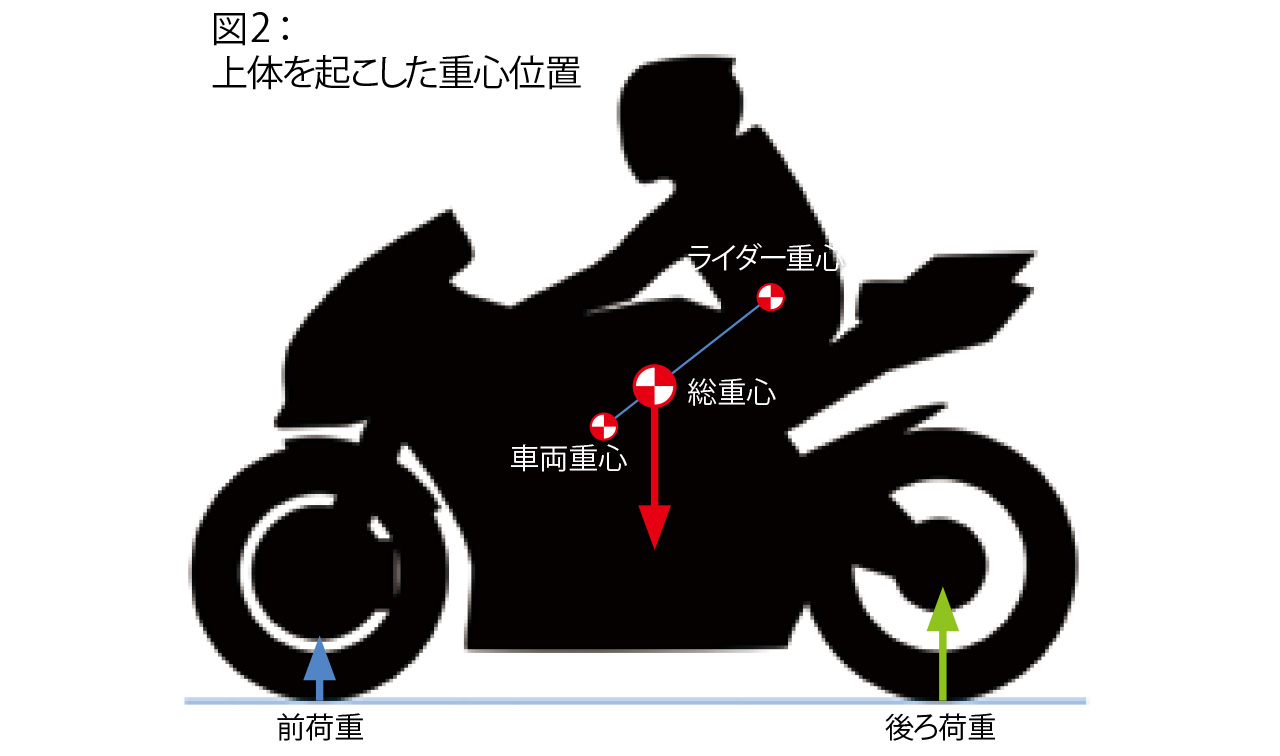
図1のように上体を前傾させるとライダーの重心はやや前方へ移動します。厳密には上下方向でもやや下側へと移動し、車両も含めた全体の重心が移動することになり、前後の接地点との釣り合いから通常のライディングポジションの時と比較すると、前輪の接地荷重が増加。後輪の接地点荷重はやや減少することになります。その逆に上体を起こした時(図2)は後輪の接地点荷重が増加することになります。
しかし、実際にこの荷重変動を計算や計測してみると上半身を動かすだけでは、車両やライダーの体重にもよりますが、わずか0・5〜1㎏程度しか変化しません。一方ライダーが着座する位置を前後に動かすとなんと5㎏以上も変化することがあります。
モトクロッサーのシートはタンクの上からリアフェンダーの上まであるのは、更にもっとダイナミックに荷重コントロールするためです。そうすることで、前輪と後輪のグリップを調整するだけでなく、操縦性にも影響するのですが、それはいつかサスペンションセッティングにて解説させていただきたいと思います。
tips_2:左右の重心移動
いわゆるリーンウィズやリーンイン、リーンアウトというライディング姿勢ですね。今回はスポーツライディングに欠かせないリーンインにて解説させてください。
図3にコーナリング中における各重心とバンク角の関係を表現します。

αはバイクの見かけ上のバンク角です。タイヤには幅があるので地面との接地点はイン側に少しずれることになります。厳密には前輪と後輪で幅が異なるのでもう少し複雑ですが、図は分かりやすくするために前後の幅は同じと仮定させてください。この接地点と重心を結ぶ線と、鉛直がなす角度がバンク角です。そしてこのバンク角はリーンウィズ時の実バンク角もほぼ同じになります。
次にライダーがハングオフすることで体重がイン側に移動(体重移動)し、車両を含めた総重心位置もイン側に移動することから、実バンク角θはαよりも深いバンク角になります。その結果より大きな遠心力とつり合い、コーナーをより速い速度、または小さな旋回半径で回ることが可能となるのです。
近年のモトGPのようにハイグリップタイヤでは、実バンク角θと見かけのバンク角αでは5〜10度近くも異なり、コーナリングGは約0・3G前後も増加するので、レースなどでは速く走るために重要なテクニックと言えます。
余談ですが、もし体重移動でバイクが傾むくとすると体重移動したままではバイクは傾き続け最後には転倒してしまうことになるのですが、実際は遠心力とつり合い(バランス)が取れて転倒することはありません。これを誤解し、正しいハンドル操作(プッシングステア)を行わず、一生懸命ハングオフだけしてカーブを曲がろうとしても、曲がり切れないというアクシデントを引き起こしてしまいます。
つまり左右に体重移動することでバイクは曲がる=傾くのではなく、正しくは体重移動とは旋回中のバンク角を補う事で速く走るためのテクニックと言うべきです。
一方、モトクロスなどのリーンアウトの効能は、これまた異なるのでバイクの運動特性って複雑です。
tips_3:ステップ荷重
一見簡単なようで実はこれほど難しく、難しいが故にちゃんんとできるライダーは限られているのではないかと私が思っているのがステップ荷重です。

3限目で解説した、ジャイロモーメントがあまり大きくない2〜30㎞/h以下の低速ではイン側のステップを踏み込むことで、ライダーの体重による作用・反作用を使って車両が傾き始めるきっかけとする(図4)のは、スラロームなどでは特に有効なテクニックです。しかしタイミングがとても難しく正直に言うと私は超苦手です。ジムカーナの選手はとてもリズミカルにされているかと思います。
そして極低速では、微妙な力で左右のステップを踏むことでトライアル選手は絶妙なバランスを取っています。このテクニックはステップを踏むことで、その反作用でライダーの体が微少に反対側に移動しています。実はこれは重心移動ではなくライダーの慣性モーメントによる反力発生作用なのです。この原理を別の機構にて制御可能にしたのが、ヤマハのモトロイドや村田製作所のムラタセイサク君。不当静止の自立制御とも言えます。
モトロイドは重心位置を制御しているのですが、絶妙なバランスを取っている時は慣性モーメントによる反力が主成分です。それは、ニュートンの第二法則であるT=Ïθの式で表されます。Tはトルク、つまりロールモーメント、Iはライダーの慣性モーメント(回転し難さ)、̈θはライダーの角加速度(回転の加速)で、それらの積(掛け算)で表されるのですが……難解ですよね。 車速が速くなりジャイロモーメントが大きくなるとライダーの角加速度を大きく発生させる必要があるのですが、そのようなステップ荷重は困難極まりないです。
逆に言うとライダーの角速度が発生しない、つまりステップを踏んでもライダーの体が動かないようなステップ荷重(図5)では、何も起こりません。とは言え、コーナリング中などではライダーが体を車体にホールドする安心感と適切なハンドル操作ができる体制を整える効果はあると考えます。
tips_4:バイク操縦の難しさ
このような複雑な理論を理解せずともトライ&エラーで正しい操縦方法(プッシングステアなど)を体得し上手になったライダーは、安全で快適なバイクライフを楽しめるのですが、そうでない場合ライディングがどんどん楽しくなくなるのでないかと私は危惧しております。正しい操縦方法を理解し、実践することで読者の皆さんにも安全で快適なバイクライフを楽しんでいただきたいと願っております。