【元ヤマハエンジニアから学ぶ】二輪運動力学からライディングを考察!|2限目:立ちゴケの経験はありますか?

二輪工学の専門家、プロフェッサー辻井によるライディング考察バイクのメカニズムや運動力学についてアカデミックに解説し、科学的検証に基づいた、ライテクに役立つ「真実」をお届けします!

講義概要 第2回目の今回は、皆さん一度は経験したことがあるであろう「立ちゴケ」のメカニズムについてです。 この現象、誰しも体験的に「不意に車体を支えきれなくなってコケた」と理解できるのですが、ではなぜ「不意に」が起こってしまうのか? という事について、深く考えることはないでしょう。 そこでここでは、運動力学的になぜ不意にバランスを崩すのかを解説します。
立ちゴケの経験はありますか?
バイクには、誰しも共通のリスクとして転倒があります。そして転倒と言えば、正直に申し上げると、私の40年以上のバイク人生で立ちゴケだけでも記憶にあるだけで3回もあります(泣)。さらに、走行中に限界を超えた転倒は数え切れずです(笑)。
では今回は、立ちゴケにフォーカスしましょう。
私が立ちゴケしたシーンとして、ひとつは発進時にエンストしてしまい、その結果転倒という、とても恥ずかしいよくあるコケ方があります。これは1限目(先月号)の「何故バイクは倒れずに走行できるのか?」の原理をご理解いただけた方には、納得いただけるかと思います。エンストによりバイクが突然前進できなくなるので、前輪接地点が移動できなくなり、バランスが崩れて転倒に至るわけです。これはたとえ直進中でも、前輪ロックによってスリップダウンするのとも、ある意味同じと言えます。
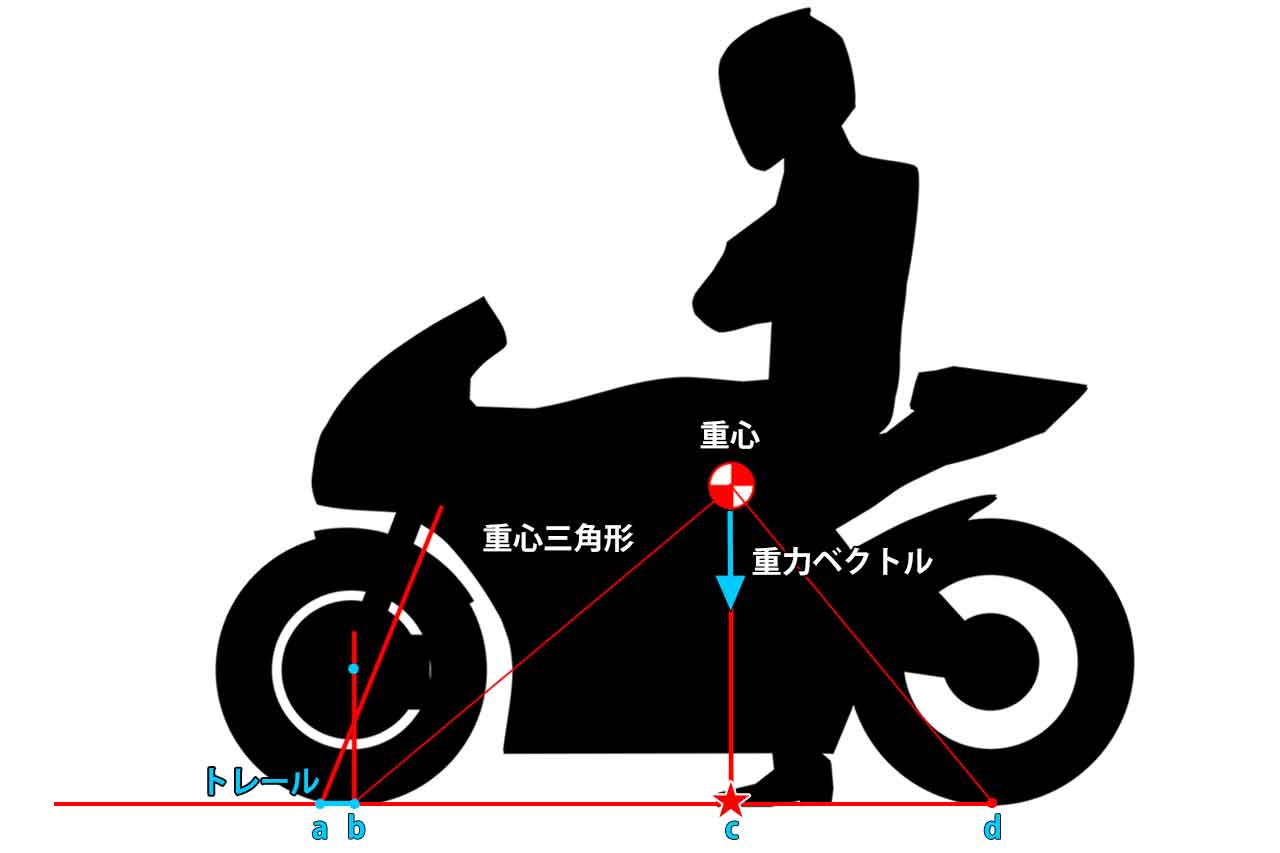
b=前輪接地点
c=重心ベクトルの延長線と地面の交点
d=後輪の接地点
そして次が、完全に停止しているのに突然フラっとしたかと思ったら、何も対処できずに気が付くとコテンと倒れてしまったという摩訶不思議な立ちゴケ。皆さんは無いですか? 今回は後者のこの摩訶不思議な立ちゴケについて解説したいと思います。
実は、この原理を理解できると、2017年にCES(ラスベガスで開催される家電ショー)でホンダが発表したHRA(HONDARidingAssist)が、「なぜ0km/hでもバイクが倒れないのか?」という理屈も納得していただけると思います。
そして、私のような悲しい思いを読者の皆様には経験してほしくないので、その対策法も述べたいと思います。
tips_1:トレールというジオメトリー(幾何学)
改めて述べるまでもないですが、皆さんご存じのように、前輪にはトレールというジオメトリーがあり、さまざまな特性を有します。実はそのひとつの特色に、摩訶不思議な立ちゴケを誘発させる特性があります。
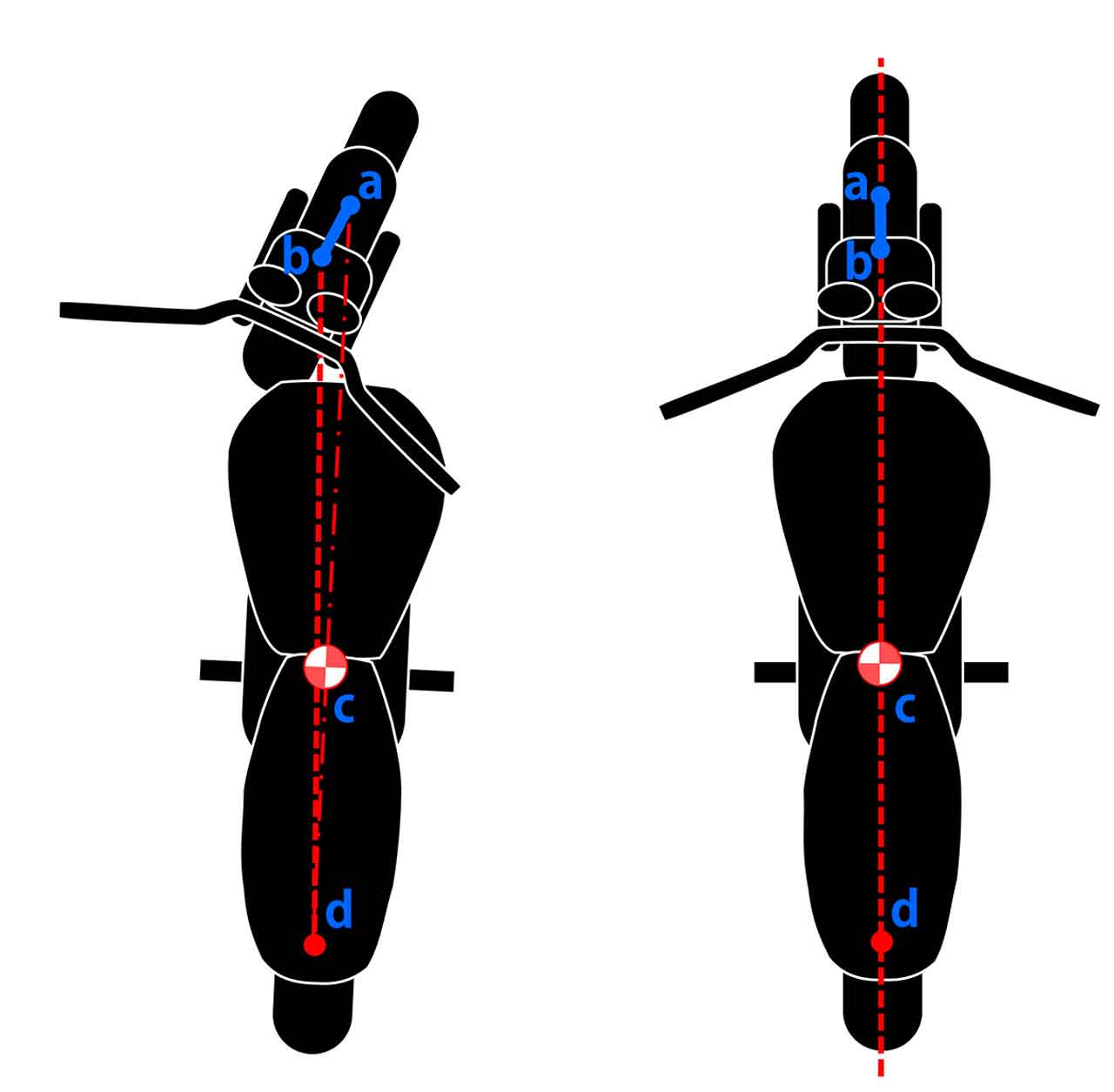
バイクを真上から俯瞰してみましょう。
停止時(車速0㎞/ h)に前輪が真直ぐで直進状態にあれば、ステアリング軸の延長線上の地面との交差点a、前輪接地点b、重心ベクトルの延長線上の地面との交点c、後輪接地点dは一直線上に重なっていて、バイクには転倒モーメントは発生せず直立状態を維持できます(図1)。
この時もし微妙に、例えば右に車体が傾いていたりしたとします。目で見て分からない程度の傾きです。これくらいなら通常、ライダーはバイクを支えられます。しかしこの時、例えば不用意にハンドルを持つ手を緩めたり離したりすると、前輪にはセルフステアというステアリングモーメントが微少ですが発生し、右に転舵しようとします。もしハンドルから手を放してしまうと、どんどん転舵される可能性が高まります。
そして、図2は少し誇張していますが、右に転舵した時に前輪接地点bは車両が停止しているので、地面との摩擦で前後左右には移動できません。もし車両が前進しているなら、前輪の方向に沿って右斜め前方へ移動しますが、今回は停止時に限定します。
停止しているとトレールがあるので、ステアリング軸の延長線と地面の交点aは、前輪接地点bを中心に右側に回転移動し、車体は微妙に右斜めに向きを変えたようになります。これは皆さんもバイクに跨って操舵すると体感できますし、サイドスタンドを立てた状態で操舵するとサイドスタンドがズリズリと音を立ててズレるのでわかると思います。
この時、前輪接地点bと後輪接地点dを結んだ線の真上から、重心ベクトルの延長線と地面の交点cは右にズレてしまいます(図3から4へ)。すると、重心三角形の面と重力ベクトルが重ならなくなり、車両には右への転倒モーメント(物体を回転させる力)が発生すのです。
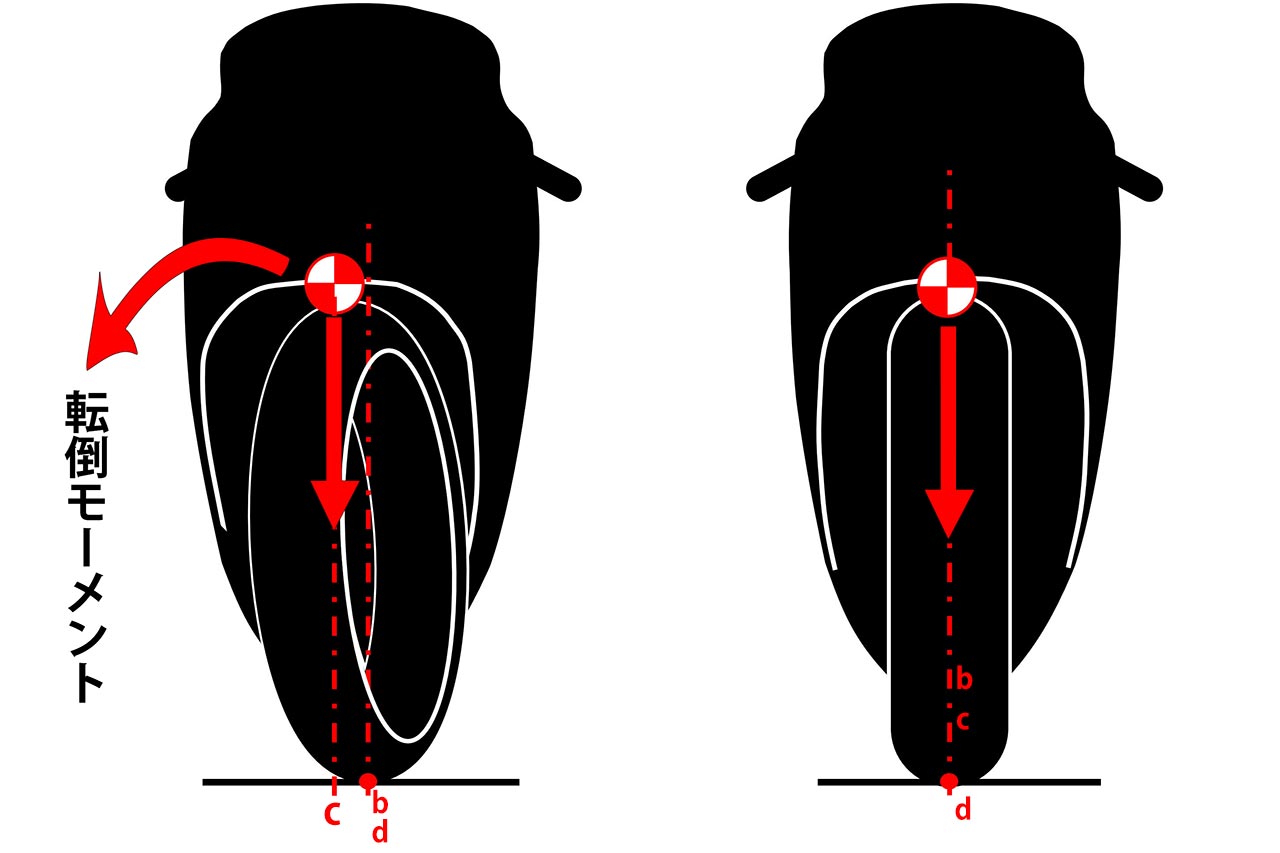
この時ライダーがとっさにハンドルを押さえたり、足で踏ん張ることができると転倒を免れるのですが、間に合わないと私のように摩訶不思議な立ちゴケとなってしまうのです(泣)。
この時もし微妙に、例えば右に車体が傾いていたりしたとします。目で見て分からない程度の傾きです。これくらいなら通常、ライダーはバイクを支えられます。しかしこの時、例えば不用意にハンドルを持つ手を緩めたり離したりすると、前輪にはセルフステアというステアリングモーメントが微少ですが発生し、右に転舵しようとします。
もしハンドルから手を放してしまうと、どんどん転舵される可能性が高まります。そして、図2は少し誇張していますが、右に転舵した時に前輪接地点bは車両が停止しているので、地面との摩擦で前後左右には移動できません。もし
tips_2:トレールの特性を逆手に取る
お気づきの方もおられるかもしれませんが、バイクが右に傾いた瞬間にステアリングを左に操舵することができたとします。すると、重心ベクトルの延長線と地面の交点cは、前輪接地点bと後輪接地点dを結ぶ線の左側に移動しようとするので、転倒モーメントが、逆向きの引き起こしモーメントに変わるのです。
これに気が付いた時、私はステアリングをアクチュエータ(動作装置)にて操舵制御できれば、バイクを自立させることが可能になると考えたのですが……。セルフステアと逆方向の制御をするには、ライダーの感覚と真逆の動きになり色々な問題があると、一旦あきらめました。
しかし後に、モトロイドに搭載されたAMCES(アムセス)という、特殊な構造による自立制御を発明することに繋がりました。
その十数年後、ホンダのエンジニアは優秀でした。マイナストレールになる構造にて操舵方向を逆にしないことを発明したのです。それが前述したHRAです。
彼らは前輪接地点bが、ステアリング軸と地面の交点aのさらに前方へ移動、つまりネガティブトレールになるよう、可変キャスター角機構を備えたのです。これは、車両が右に傾いた時に、右側にステアリングを転舵することで、自立モーメントを発生させ、バイクの自立制御を可能としたのです。トレールの特性を理解し、利用したのです。もちろんこれらの現象は左側でも同様に作用します。
しかし、残念ながらHRAもAMCESもまだ市販されていないので、立ちゴケのリスクは今も存在し続けています。ですので読者の皆さんには、停車時にはハンドルを真直ぐに維持することを心掛け、ハンドルからは手を離さないことをお勧めします。
どうしてもハンドルから手を放したい時には、股間でニーグリップ気味に車両をホールドしながら両足を地面につけることで車体が傾かないようにする……。当たり前かもしれませんが。